最优策略(optimal policy)
面对一个问题,可能有策略千万条,哪一条是最好的呢?事实上,总是存在:
如果策略\(\pi\)使得其状态的回报(return)的期望大于或者等于其他任意的策略\(\pi^{'}\),则称策略\(\pi\)为最优策略。
| 状态的回报的期望即为\(v_{\pi}(s)\),即:$$\mathbb{E}_{\pi}[G_t | S_t=s,A_t=a]\(。也就是说,对于任意状态\)s\in\mathcal{S}\(都有\)v_{\pi}(s)>=v_{\pi^{‘}}(s)\(,则称\)v_{\pi}(s)\(为最优状态价值函数,记为\)v_*(s)$$。显然有: |
如下图所示,对于给定的状态s,存在不同的策略\(\pi\),使得从状态s到动作a的路径不同。不同的路径回报不同,能够使得状态s的回报最大的策略\(\pi\)即为最优策略,记为\(\pi_*\)。
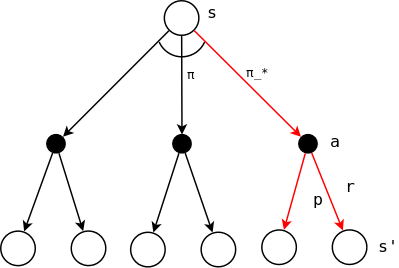
直观的理解,不同的动作方向会导向不同的状态\(s'\),带来不同的状态价值(\(s'\)状态价值的加权平均,即期望)。能够使得\(s'\)的状态价值最大化的动作记为最优的动作,或者说是最优策略。也就是说,通过状态价值函数判断最优策略,需要计算下一级节点的状态价值的期望,这就是作者所说的“one-step search”,只需要往前走一步,即可以判断当前的动作组合中,哪个是最优的:能够使得\(s'\)的状态价值函数的期望最大化的动作,选择这个最优的动作即为最佳策略。显然,这是一种完全的“贪心算法”,只基于下一步做出的决策。幸运的是,\(s'\)的状态价值函数实际上已经包含了长期的价值(思考一下状态价值函数的定义),因此:
A
one-step-ahead searchyields the long-term optimal actions.
同理,对于最优动作价值函数\(q(s,a)\)也有类似的定义:
\[q_{*}(s,a)=\max_{\pi}q_{\pi}(s,a)\]如果已知\(q_*(s,a)\),此时的动作\(a\)已经是最优动作了,因此动作\(a\)导向的状态\(s'\)必然是最优的状态,求解\(q_*(s,a)\)只需要将动作\(a\)下的\(s'\)的价值加权平均即可:
\[\begin{align} q_*(s,a) &=\mathbb{E}[G_t\mid S_t=s,A_t=a]\\ &=\mathbb{E}[R_{t+1}+\gamma v_*(S_{t+1})\mid S_t=s,A_t=a]\tag{2} \end{align}\]注意和通常的\(q(s,a)\)定义的区别:
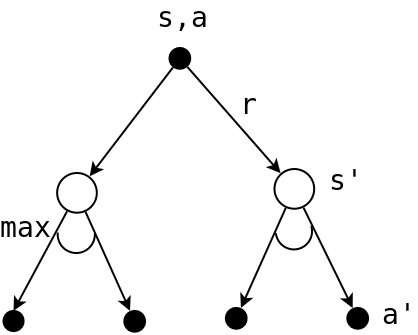
\[\begin{align} q(s,a) &=\mathbb{E}[G_t\mid S_t=s, A_t=a]\\ &=\mathbb{E}[R_{t+1}+\gamma v(S_{t+1})\mid S_t=s,A_t=a] \end{align}\]下图可以直观的解释\(q_*(s,a)\)的意义:
上面反复说的,其实是一个事情:
\[\begin{align} v_*(s) &=\max_{\pi}v_{\pi}(s)\\\tag{1.1} &=\max_a q_*(s,a)\\\tag{1.2} &=\max_a\mathbb{E}_{\pi_*}[G_t\mid S_t=s,A_t=a]\\\tag{1.3} &=\max_a\mathbb{E}_{\pi_*}[R_{t+1}+\gamma G_{t+1}\mid S_t=s,A_t=a]\\\tag{1.4} &=\max_a\mathbb{E}[R_{t+1}+\gamma v_*(S_{t+1})\mid S_t=a,A_t=a]\\\tag{1.5} &=\max_a\sum_{r,s'}p(s',r\mid s,a)[r+\gamma v_*(s')]\\\tag{1.6} \end{align}\]寻找最优策略,其实是寻找最优动作的过程:如何选取动作\(a\),能够使得\(q_*(s,a)\)最大化\(,此时的\)q_*(s,a)$$即为最优的状态价值函数。
上式每一个步骤的解释:
- 1.1,最佳状态函数的原始定义;
- 1.2,通常的状态价值函数是\(q(s,a)\)的加权平均,但是在寻找最佳状态函数的过程是找到一个动作\(a\),使得\(q(s,a)\)最大化,最优的状态价值函数即为这个最大化的\(q_*(s,a)\);
- 1.3,在最优策略\(\pi_*\)下\(q_*(s,a)\)的加权平均定义;
- 1.4,进一步的展开为immediaterly reward和长期回报,依然依赖于最优策略;
- 1.5,根据式2对\(q_*(s,a)\)的展开,此时已经不依赖于最优策略,但是其实\(v_*\)还是暗示了这是最优策略下的最优状态价值函数;
- 1.6,最终的最优状态价值函数的展开式,表达了当前时刻的最优价值函数和下一时刻的最优价值函数的关系,即Bellman最优等式
最优策略的案例:grid world问题
理论分析总是枯燥的,实战中寻找最优策略往往直接了当:对于每一个节点(时刻),计算动作空间产生的所有状态价值函数,选取最大的状态价值函数作为当前节点的状态价值,如此迭代循环,直到找到最优策略为止。
grid world问题参见:在那里,仅仅给出了在每个格子的状态价值函数(策略\(\pi\)为随机平均策略)。下面的方法可以计算grid world的最优策略:
def grid_world_optimal_policy():
"""计算格子世界的最优价值函数和最优策略
"""
value = np.zeros((WORLD_SIZE, WORLD_SIZE))
# 通过一个数组来表示每一个格子的最优动作,1表示在相应的方向上最优的
optimal_policy = np.zeros((WORLD_SIZE, WORLD_SIZE, len(ACTIONS)))
episode = 0
while True:
episode = episode + 1
# keep iteration until convergence
new_value = np.zeros_like(value)
for i in range(WORLD_SIZE):
for j in range(WORLD_SIZE):
# 保存当前格子所有action下的state value
action_values = []
for action in ACTIONS:
(next_i, next_j), reward = step([i, j], action)
# value iteration
action_values.append(reward + DISCOUNT * value[next_i, next_j])
new_value[i, j] = np.max(action_values)
optimal_policy[i, j] = get_optimal_actions(action_values)
error = np.sum(np.abs(new_value - value))
if error < 1e-4:
break
# 观察每一轮次状态价值函数及其误差的变化情况
print(f"{episode}-{np.round(error,decimals=5)}:\n{np.round(new_value,decimals=2)}")
value = new_value
print(f"optimal policy:{optimal_policy}")
def get_optimal_actions(values):
"""计算当前轮次格子的最优动作
:param values:格子的状态价值
:return: 当前的最优动作。解读这个最优动作数组,要参考ACTIONS中四个动作的方向定义,
数值为1表示此动作为最优动作
"""
optimal_actions = np.zeros(len(ACTIONS))
indices = np.where(values == np.amax(values))
for index in indices[0]:
optimal_actions[index] = 1
return optimal_actions
grid world的最优价值函数如下图所示:
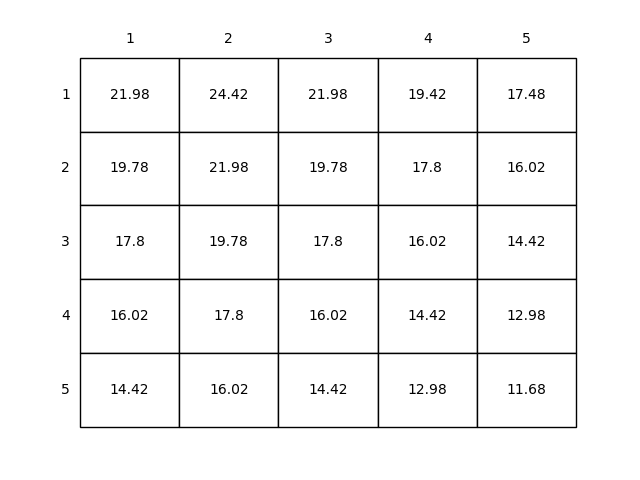
完整的grid world程序参见:grid world源码
