问题的提出
将policy evaluation和policy iteration的算法图并列在一起,可以看出,在policy evalution中,计算状态价值函数是要考虑不同动作的收益和的,但是在policy iteration中的policy evaluation中,计算状态价值函数并没有考虑不同动作的收益和,看起来只是计算了\(q(s,a)\)作为状态价值函数,是什么道理呢?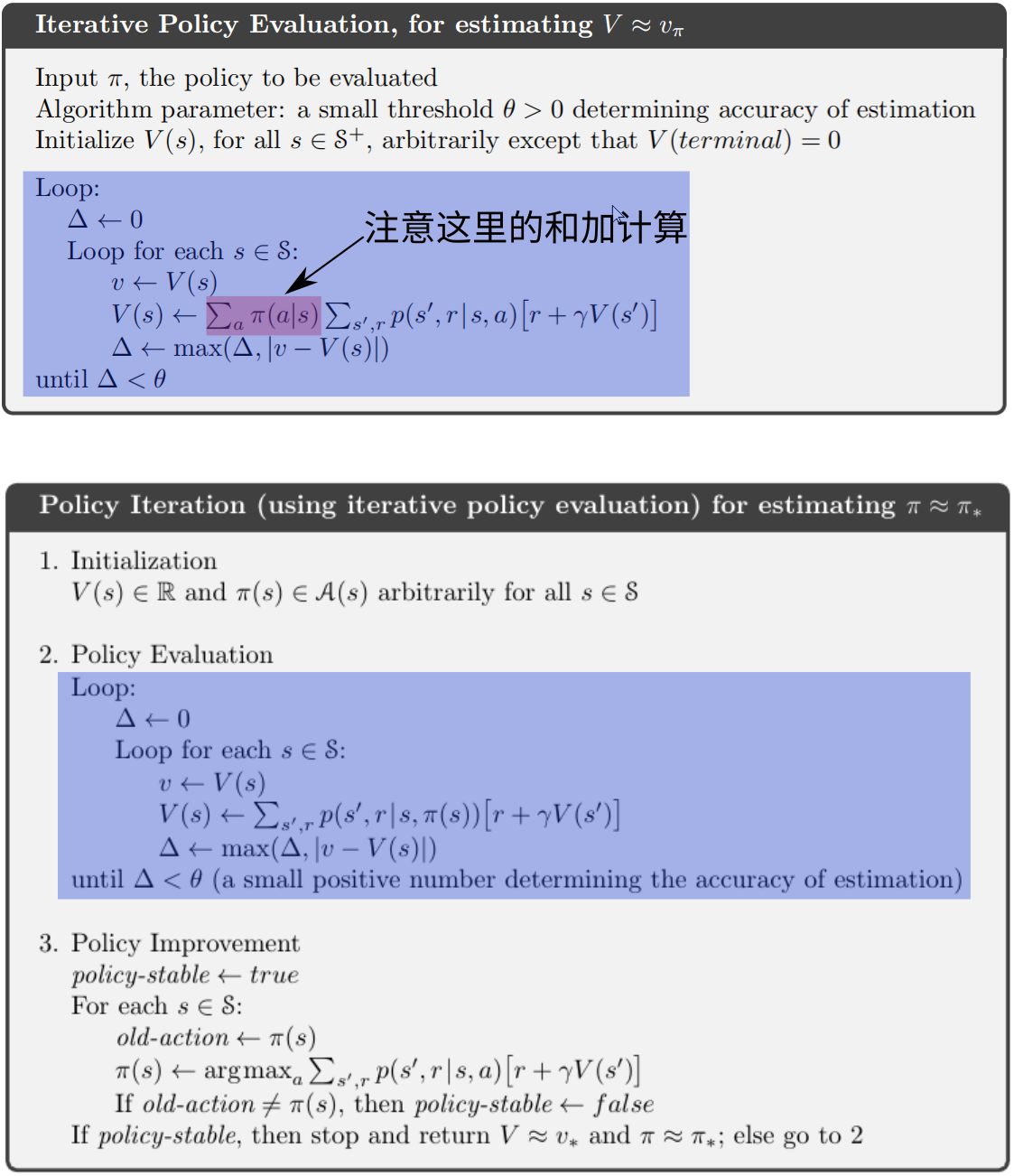
释疑
独立的policy evaluation算法只是对策略的评估,并没有后续的优化的策略步骤,因此在评估一个策略对状态价值的影响时,需要考虑该策略下所有动作对状态的影响,这是必然的。独立的策略评估很少单独使用,原因见下面的策略迭代(policy iteration)的分析。
策略迭代的第一步是策略评估,但是这里的策略评估和独立的策略评估过程是不同的:策略迭代中的策略评估,其实是在一轮策略增强的基础上进行评估的,也就是说,评估上一轮策略增强的效果。如下图所示:

在整个策略序列\(\pi_0,\pi_1, \pi_2\ldots\)中,除了\(\pi_0\)外,\(\pi_1, \pi_2\ldots\)都是策略增强的结果,即在策略评估的基础上,往前看一步,选择使得\(q(s,a)\)最大化的动作\(a\)。也就是说,\(\pi_1, \pi_2\ldots\)都是局部最优策略。虽然\(\pi_0\)不是策略增强的结果,但是如果我们把初始的策略也看做是一个局部最优策略:毕竟,在\(\pi_0\)的前面并没有参照,一个唯一的存在自然可以看做是当前最优的。于是我们可以说,\(\pi_0,\pi_1, \pi_2\ldots\)都是局部最优策略。对于局部最优策略的评估,显然策略已经给出了使得当前的\(q(s,a)\)最大化的动作\(a\)(科可能不止一个,但是效果一样),因此我们在评估这个局部最优策略时,只需要评估这个最优动作\(a\)带来的价值即可,无需考虑所有的动作,这就是在策略迭代的策略评估中没有\(\sum_a\pi(a\mid s)\)这一项的原因。
简单的说,策略迭代中的策略评估,是评估逐步优化(比如greedy policy)的策略,而非任意的策略(独立的策略评估针对任意的策略),因此只需考虑最优动作的价值。下面是一个实际的案例(摘自Jack’s car rental):
# policy evaluation (in-place)
while True:
old_value = value.copy()
for i in range(MAX_CARS + 1):
for j in range(MAX_CARS + 1):
new_state_value = expected_return([i, j], policy[i, j],
value, constant_returned_cars, POISSON_UPPER_BOUND)
value[i, j] = new_state_value
max_value_change = abs(old_value - value).max()
print('max value change {}'.format(max_value_change))
if max_value_change < 1e-4:
break
可以看出,策略评估过程中,每一个状态只调用一次expected_return方法计算状态的价值:因为给出的策略(policy[i,j])已经是局部最优了,只需要计算这个局部最优的策略(动作)的价值即可。
